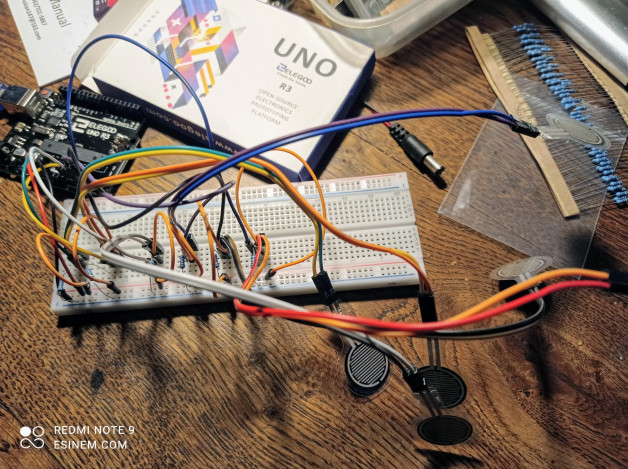
Finally, all the bits I needed for a prototype arrived for the great Arduino-based shibari suspension experiment. The latest arrival was six FSRs which will sense to load. This meant I could test reading all the sensors and displaying the recorded loads.
It lives!
As I have almost zero experience in these things, I found a simple project with a single FSR. It was suprisingly quick and easy to hook it up to get a reading. Encouraged by this, I got a second sensor reading by the quick and dirty method of duplicating the code with different pin numbers.
Even in my ignorance, I know this is not the way to code so I started Googling tutorials on loops and arrays. By a stroke of luck, I stumbled across some code to read the analog output from all six pins on the Arduino. It was exactly what I needed, albeit the ouput was not formatted to my liking. Emboldened by my earlier success, I made a few changes and came up with the read-out below, which is close enough for now.
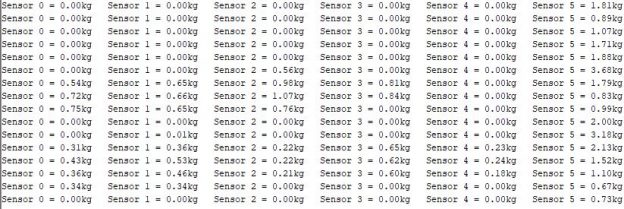
You might be forgiven for thinking that I am further ahead than I am. The results above are wholly inaccurate by a factor of 10-20x, although proportionate. The next step is to calibrate the sensors so the readings are as accurate as possible. This will mean applying known loads and recording the output to enable converting it to Kg and working out percentage load distribution.
Protection needed
The FSR’s are made of thin film with fragile connectors, so I’m going to need to protect them in use. It seems that it is common to sandwich them between two plastic disks, the one underneath being slightly larger. My current plan is to add disks, hot glue the connectors and sandwich the lot between 3mm neoprene.

What next?
I suspect that there might be some trial and error before we get this to an usable stage. However, I’m getting help from several volunteers with experience in coding and robotics. One, who is involved in medical technology, sent me a very relevant article using exactly this sort of sensor for getting feedback relating to human mobility. I feel sure there will be some useful ideas from him and my other helpers.
I can see the coding side getting well beyond my skills very quickly if this is going beyond my rudimentary prototype. Hopefully, the others will be able to polish this rough diamond. Fundamentally, the idea works. The next question to answer is “Can it give useful results in a suspension?”. Watch this space!